- So 03 Dezember 2017
- Image Processing
- #rotation, #shearing, #java, #matrix operations, #image filters, #basic image operations
In the modern world of image processing, nobody thinks about about “simple” tasks such as the rotation, shearing or mirroring of an image because such functions have become so standardized, that even the simplest photoviewers include them. Nevertheless, besides their abundance, a lot of programmers do not know the underlying algorithms. Whilst it is easy to understand the short transformation algorithms for shearing or mirroring (which only include a few calculations and/or assignment of values), algorithms for rotation of matrices (such as images) through an arbitrary angle are more complex in comparison.
One of my favourite algorithms in the one presented by Alan W. Paeth in the year 1986 (Graphics Interface). In this paper, Paeth describes a rotation algorithm which uses 3 consecutive shear operations to perform arbitrary angle rotation. In contrast to many other rotation algorithms, Paeths method produces exact values for for rotations with multiples of 90°
Needed values
Peath defines 2 values needed to perform the shearing operations:
- α (alpha): Angle for X-Axis rotations
- β (beta): Angle for Y-Axis rotations
- α = -tan(θ/2)
- β = sin(θ)
- x = x + α * y
- y = y + β * x
- x = x + α * y
Example
Imagine you would like to rotate an image or matrix through 45°. At first, you had to calculate α and β for the shear operations. To do so, you have to keep in mind that the algorithm uses the angle given in radians, so you have to first transform the given angle from degree to radians. This is easy done:- θradians = θ * 0,0174533 = 45° * 0,0174533 = 0,7853985 rad
- α = -tan(θ/2) = -tan(0,7853985/2) = -0,41 rad
- β = sin(θ) = sin(0,7853985) = 0,71 rad
- P(0;0):
- First shear: x = 0 + (-0,41) * 0 = 0
- Second shear: y = 0 + 0.71 * 0 = 0
- Third shear: x = 0 + (-0.41) * 0 = 0
- P(1;0):
- First shear: x = 1 + 0,41 * 0 = 1
- Second shear: y = 0 + 0.71 * 1 = 0.71
- Third shear: x = 1 + (-0.41 * 0.71) = 0.708
- P(0;1):
- First shear: x = 0 + (-0,41) * 1 = -0.41
- Second shear: y = 1 + 0.71 * (-0.41) = 0.707
- Third shear: x = -0.41 + (-0.41) * 0-707 = -0.71
- P(1;1):
- First shear: x = 1 + (-0,41) * 0 = 0.59
- Second shear: y = 1 + 0.71 * 0.59 = 1.41
- Third shear: x = 0.59 + (-0.41) * 1.41 = 0.00
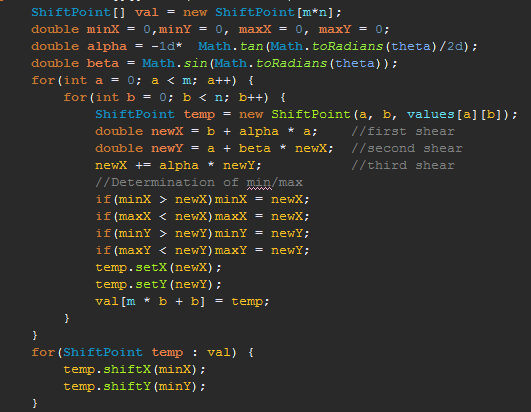
Implementation
Here's an examplary implementation in Java:
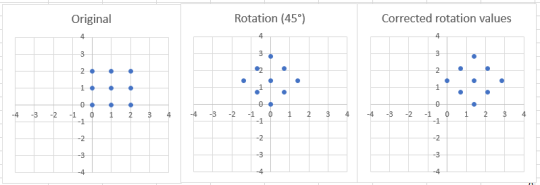
Graphic representation of the rotation and normalization